From Inderpreet Singh on Hackaday:
Music-Loving BeagleBone
Robotic control can get very complicated when multiple actuators need to work in coordination with each other. A simple robotic arm will require each joint to be controlled in sequence to attain a particular position. The BeagleBone Blue comes armed with motor drivers, sensor inputs, and wireless and is built for robotics.
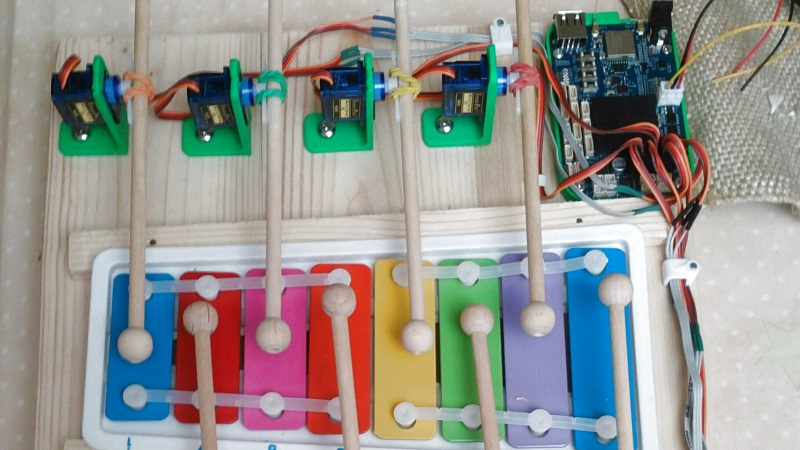
[Andy] has prepared a musical robot called the BeagleBone Blue Electro-Mechanical Glockenspiel using the single board computer. The hardware consists of eight servo motors each with a mallet stick attached to them. The motors themselves are mounted on 3D-printed brackets allowing them to be mounted at the correct height. The servos connect to the main board for position control, however, an external supply had to be used to supply the necessary current to all the motors.

The software side has programs to translate notes into servo positions as well as connect to a web brower via MQTT and websockets. The basic user interface is simple and has buttons to connect to and send the keystrokes.
The source code and OpenSCAD designs are available on GitHub:
Workshopshed/musicController
BeagleBone Blue Music Player
I wanted to do a mini project with the BeagleBone Blue that would utilise all of its servo capabilities. So I came up with the idea of a mechanical glockenspiel.