Inspiration is not an easy thing to come by, and no one can predict
when it will strike. The light bulb suddenly flashes on overhead,
and the gears inside your brain start to turn. The excitement of
the Ah hah! moment is great, but often short lived when the
realization of the logistics come into play.
Engineers often find themselves in this situation when a new idea
for a robot pops into their head, but then there is the complicated
process of crafting the internal hardware and writing the software
to actually make it work. James Strawson, PhD student at the
University of California, San Diego (UCSD) and founder of Strawson
Design, grew tired of having to create new circuits for every new
robot that he worked on, so he unified his current and future
robotics projects under one hardware and software platform, thus
creating the Robotics Cape.

Robotics Cape by Strawson Design; image credit: Strawson Design
The Robotics Cape works with the
BeagleBone Black, powered by a TI
Sitara processor, to make a mobile robotics platform. It includes
2-cell lithium battery charging, protection and monitoring circuitry
to make sure the robot is always charged and ready to play with.
The Robotics Cape also provides plug-and-play connectors to easily
interface with common components so you can build your robot without
soldering or messy wiring. It was obvious for James to choose
BeagleBone Black when picking a Linux development board. Strawson
said, First and foremost, robotics projects typically require the
control board to interface with custom circuitry. BeagleBone Black
provides an enormous array of hardware interface pins for functions
such as GPIO, PWM, eQEP, I2C, etc., which is exactly what tinkerers
and prototypers need. BeagleBone Black is also a fantastically neat
and tidy package that is ideal for tiny robots.
When creating the cape, Strawson picked the features he felt would apply
to the largest number of applications. The cape offers:
9-axis IMU: Accelerometer, gyro, magnetometer
6 PWM connectors to power servos or brushless ESCs
Power your BeagleBone with 5V 2A switching voltage regulator from
12v input or battery pack
2 user-accessible buttons and 2 LEDs to test GPIO functionality
and to test PRU GPIO
2-cell lithium cell balancer and overvoltage protector
H-bridges to drive 6 DC motors (each 1.2A continuous, 3.2A peak)
Plug-and-play connection supported:
o I2C, UART, SPI
o Range/gesture sensors
o Serial GPS module
o Spektrum RC receiver
o Quadrature encoder inputs
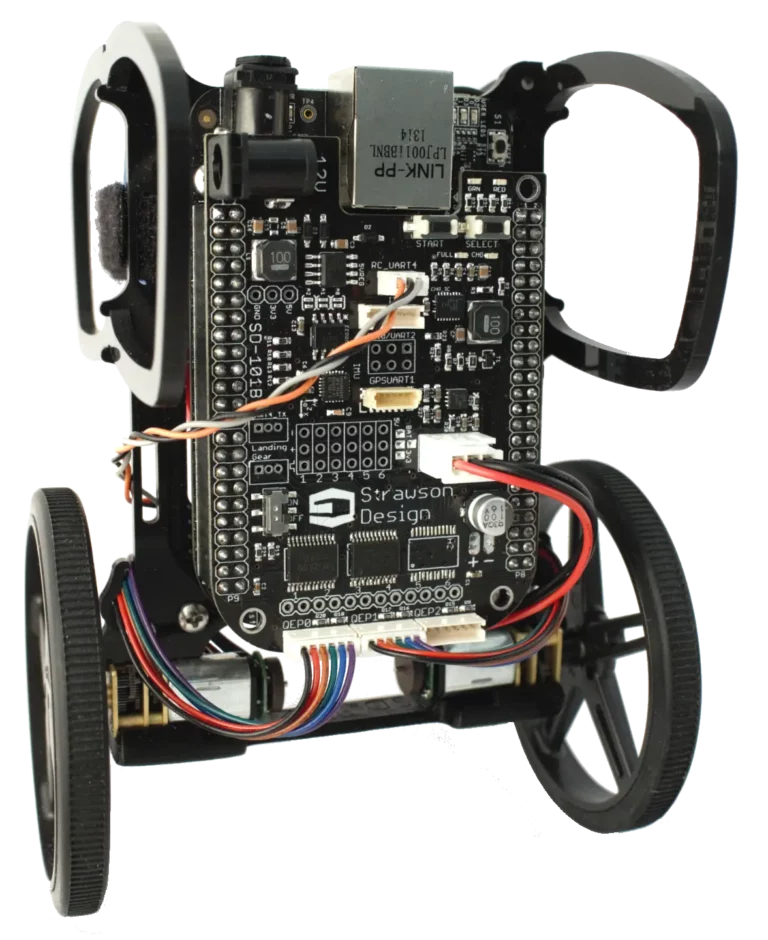
Strawson first used the Robotics Cape to teach a senior embedded
controls course at UCSD. Each student built their own BeagleMIP
balancing robot based on the cape and was taught to design and
implement a discrete-time controller to make the robot balance
upright and drive. Texas Instruments University Program donated
BeagleBone Black computers to UCSD to enable such a wonderful
project. We learned a lot about implementing dynamic control
systems in a Linux environment. I was pleased to teach fellow
mechanical engineers how to dive into the world of embedded
programming and circuit design, Strawson said.

BeagleMIP balancing robot; image credit: Strawson Design
Strawson is working on a few refinements on the board layout and
connectivity before bringing the Robotics Cape to market. He also
looks forward to spending more time developing control systems with
BeagleBone Black. He is testing a quadrotor controller based on the
BeagleBone Black as well as a Robotics Cape Combination designed to
be cheap and easy to repair while offering the networking
capability and processing power of BeagleBone Black.

James Strawson demoing the BeagleMIP at CES 2014
The Robotics Cape is still a work in progress but will be available
for sale in the coming months. For updated information on the
Robotics Cape, visit Strawson Designs website at
www.strawsondesign.com.