Categories: Beginner
Getting Started with Simulink Coder Support Package for BeagleBone Blue Hardware
This example shows you how to use Simulink Coder™ Support Package for BeagleBone® Blue Hardware to run a Simulink® model on a BeagleBone Blue hardware.
Copyright(C) 2017 The MathWorks, Inc.
Introduction
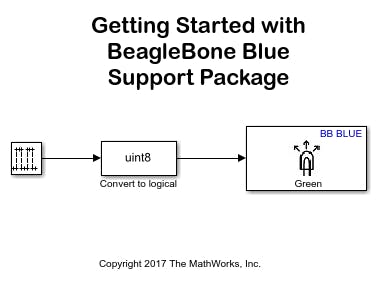
The Simulink Support Package for BeagleBone Blue Hardware provides a set of predefined blocks. These blocks include algorithms that you can use to configure peripherals on the BeagleBone Blue hardware. In this example, you will learn how to create a Simulink model that blinks the green LED on Beaglebone Blue.
Prerequisites
If you are new to Simulink, we recommend you complete:
- Getting Started section of the
Simulink documentation
Required Hardware
To run this example you need a BeagleBone Blue board and a micro USB cable.
Task 1: Create a Model
A sample model is available at
Getting Started with BeagleBone Blue Support Package Model
for you to use. You can either click the link and save the model on your computer, or perform these steps to create the model:
1. In the MATLAB® Command Window, enter
simulink
.
2. On the Simulink Start Page, click the
Blank Model
template.
3. On the Simulink model toolbar, click the Library Browser button.
4. From the Simulink Library Browser dialog box, add these blocks to your model:
a.
Pulse Generator
: Select
Simulink > Sources
. In the right pane, right-click the
Pulse Generator
block, and select
Add block to model untitled
.
b.
Data Type Conversion
: Select
Simulink > Signal Attributes
. In the right pane, right-click the
Data Type Conversion
block, and select
Add block to model untitled
.
c.
LED
: Select
Simulink > Simulink Coder Support Package for BeagleBone Blue Hardware
. In the right pane, right-click the
LED
block, and select
Add block to model untitled
.
5. Connect the blocks as shown in the image and save the model.
Task 2: Configure the Block Parameters
If you are using the sample model, skip this task.
1. In the Simulink model, double-click the
Pulse Generator
block. In the Block Parameters dialog box:
a. From the
Pulse type
list, select
Sample based
.
b. In the
Sample time
box, enter
0.1
.
c. Click
OK
.
2. Double-click the
LED
block. In the Block Parameters dialog box, from the
LED
list, select
Green
and click
OK
.
Task 3: Connect BeagleBone Blue to the Computer
1. Connect the micro USB cable into the micro USB port of the hardware.
2. Connect the other end of the cable to your computer. Wait for the power LED on the hardware to start blinking and become stable.

Task 4: Configure the Simulink Model
A pre-configured sample model is available at
Getting Started with BeagleBone Blue Support Package Model
for you to use. You can either click the link and save the model on your computer, or perform these steps to configure the model:
1. To configure the model, click the Model Configuration Parameters button on the Simulink toolbar.
2. In the Configurations Parameters dialog box, select
Hardware Implementation
.
3. From the
Hardware board
list, select
BeagleBone Blue
. This selection automatically populates the parameters in
Hardware board settings
with the default values for the BeagleBone Blue hardware.
4. Under
Target Hardware Resources
, select
Board Parameters
.
5. Verify the values for the
Device Address
,
Username
, and
Password
parameters. The default values are
192.168.7.2
,
debian
, and
temppwd
, respectively. Change the values as required and click
OK
.
Task 5: Run the Model on the Hardware
1. To run the model on the BeagleBone Blue hardware, click the Deploy to Hardware button on the toolbar.
The green LED on the hardware starts blinking once per second. If the LED does not blink, analyze the log result, as described in the
Analyze the Log Result
section.
2. To verify that the model is running on the BeagleBone Blue hardware, enter these commands in the MATLAB® Command Window:
bbblue = beagleboneblue;
isModelRunning(bbblue,'beagleboneblue_gettingstarted');
bbblue
is an object that represents the BeagleBone Blue hardware. For more information on the
beagleboneblue
function, see
beagleboneblue
.
beagleboneblue_gettingstarted
is the name of your Simulink model. This command returns true if the model is running on the BeagleBone Blue hardware.
Task 6: Stop and Rerun the Model
1. In the MATLAB Command Window, create a connection from the MATLAB software to the Beaglebone Blue hardware.
bbblue = beagleboneblue;
bbblue
is an object that represents the BeagleBone Blue hardware. For more information on the
beagleboneblue
function, see
beagleboneblue
.
2. To stop the model running on the hardware, use this command:
stopModel(bbblue,'beagleboneblue_gettingstarted');
beagleboneblue_gettingstarted
is the name of your Simulink model.
The green LED on the BeagleBone Blue hardware stops blinking. If the LED does not stop blinking, analyze the log result, as described in the
Analyze the Log Result
section.
3. To verify if the model has stopped running on the hardware, use this command.
isModelRunning(bbblue,'beagleboneblue_gettingstarted');
This command returns false if the model has stopped running on the BeagleBone Blue hardware.
4. To rerun the stopped model, use this command:
runModel(bbblue,'beagleboneblue_gettingstarted');
The model starts running on the hardware, and the LED starts blinking again. If the LED does not start blinking, analyze the log result, as described in the
Analyze the Log Result
section.
Task 7: Analyze the Log Result
The output of the model running on the BeagleBone Blue hardware is redirected to a log file. In case of unexpected results when running your model on the hardware, analyze the diagnostic messages in the log file. To see the contents of the log file for the
beagleboneblue_gettingstarted
model, use this command in the MATLAB Command Window:
system(bbblue,'cat beagleboneblue_gettingstarted.log');
You can import the log file to your computer by using this command in the MATLAB Command Window.
getFile(bbblue,'beagleboneblue_gettingstarted.log');
The
getFile
command saves the log file to your current MATLAB directory.
Comments are not currently available for this post.