Using BeagleBone Blue to build an Autopilot Robot (part 1) – Circuit Cellar article
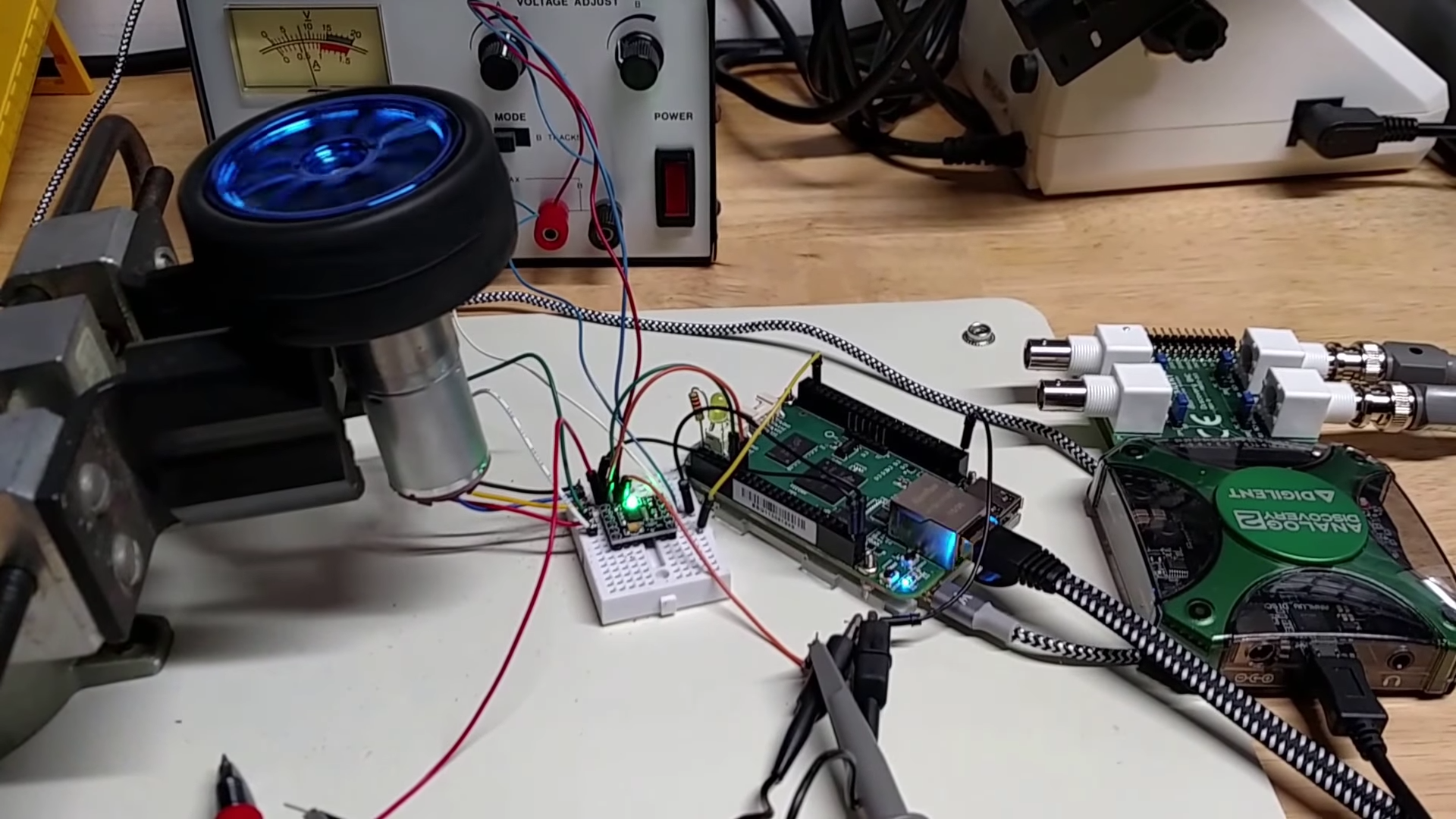
Hi folks! My name is Pedro Bertoleti and I’m a software engineer from Brazil. The October issue of Circuit Cellar’s magazine came out yesterday (9/18/2018), and I’ve written one of the articles of this issue (Title: “Building an Autopilot Robot (part 1)”, page 16). This article shows the groundwork for reliable speed estimation based in […]